Arduinoなど電子工作における筋電センサーの基礎から配線・応用まで総合解説
以下の記事は、Arduinoなどのマイコンを用いた筋電センサーの基礎から配線・コード例、リハビリ機器の制作・臨床応用へのアドバイスまで、一通り網羅することを目的としています。筋電センサーを扱う上でのメリット・デメリット、注意点や安全管理なども含めて解説します。本記事だけで一通りの理解と応用の糸口が得られるよう、なるべく詳細にまとめました。
目次
- 1. はじめに
- 2. 筋電センサーとは
- 3. 筋電センサーの原理
- 4. 筋電センサーの種類
- 4.1. サーフェス(表面)筋電センサー
- 4.2. ワイヤレス筋電センサー
- 4.3. 自作筋電アンプ(カスタム回路)
- 5. Arduinoなど電子工作との連携
- 5.1. Arduinoで筋電センサーを扱う基本構成
- 5.2. 配線例
- 5.3. コード例
- 6. リハビリ機器・応用例
- 6.1. リハビリ機器の試作
- 6.2. 義手・外骨格(パワードスーツ)への応用
- 6.3. ヘルスケア・トレーニングシステムへの応用
- 7. メリット・デメリット
- 8. 注意点
- 8.1. 生体信号の取り扱い
- 8.2. ノイズ対策
- 8.3. センサーの安全性・電気的リスク
- 9. 臨床応用に向けて
- 10. まとめ
1. はじめに
筋電センサー(EMGセンサー)は、筋肉の活動に伴って皮膚表面に現れる微弱な電気信号(筋電位)を計測する装置です。近年、ArduinoやRaspberry Piなどのマイコンを使い、低コストかつ手軽に扱えるセンサーやモジュールが市販されるようになり、研究用途だけでなく個人のプロトタイピングにも広く使用されるようになりました。
特にリハビリテーション分野では、患者さんの筋活動の把握や、義手・外骨格の制御などに活用されており、今後さらに発展することが期待されています。しかし、生体信号を取り扱うには安全面やノイズ対策などの配慮が必要です。また、臨床応用を視野に入れる場合には、法規制や倫理面も考慮しなければなりません。
本記事では、筋電センサーの構造や測定原理、電子工作のポイント、リハビリ機器の開発アイデア、そして実際に臨床へ応用するための流れや注意点について解説します。
2. 筋電センサーとは
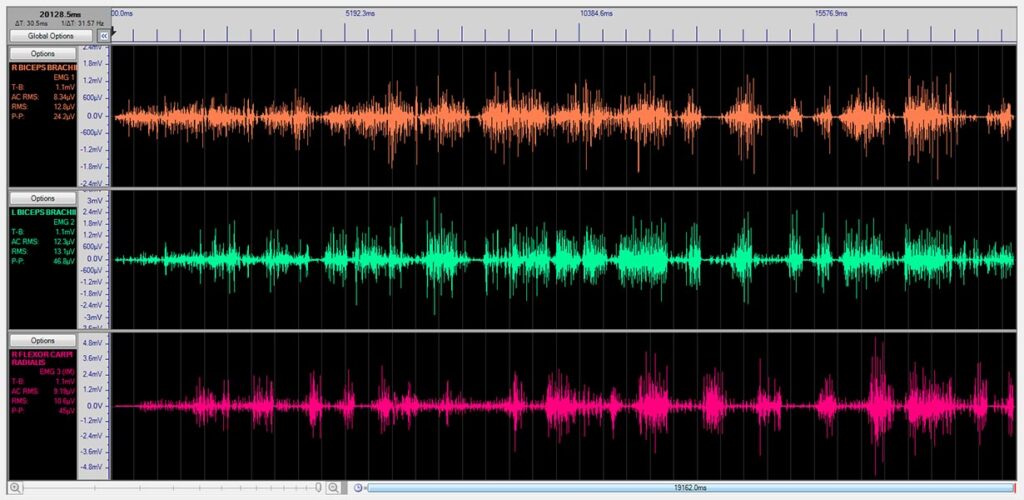
筋電(EMG: Electromyography)とは、筋肉の収縮に伴って発生する電気信号です。筋肉は運動ニューロンからの指令を受けて活動する際に電位変化が起こりますが、皮膚表面においてもその微弱な電流が測定できます。一般的には数十μVから数mVオーダーの振幅で、周波数帯は10Hz~500Hz程度が中心です。
筋電センサー(EMGセンサー)は、この微弱な生体信号を増幅し、フィルタ処理を行い、アナログまたはデジタル信号として取得できるようにしたものです。センサーによっては、そのままアナログ出力を得られるものや、I2CやSPIなどのデジタル通信機能を備えたものもあります。
3. 筋電センサーの原理
筋電信号は大変微弱でノイズに埋もれやすいため、測定には高ゲインな差動アンプ(Instrumentation Amplifier)が用いられます。さらに、低周波/高周波ノイズを除去するためにローパスフィルタ(高周波をカット)やハイパスフィルタ(低周波やオフセットをカット)が組み込まれています。
多くの既製筋電センサーモジュールでは、以下のステージが含まれます。
- 入力バッファ/差動アンプ: 筋電信号を差動増幅。
- フィルタリング: ローパスフィルタ・ハイパスフィルタ等。
- 整流/エンベロープ抽出: 信号を整流し、振幅を抽出。
- 最終段増幅: 表示やA/D変換で扱いやすいレベルに増幅。
たとえば、SparkFun社のMyoWareモジュールや、DFRobotの筋電センサーモジュールは、このような回路がワンボードで完結し、電源を接続するだけでアナログ信号出力が得られるようになっています。
4. 筋電センサーの種類
4.1. サーフェス(表面)筋電センサー
リハビリや簡易検出に多用されるのが、皮膚表面に貼り付ける電極(使い捨てのゲル電極など)を使用する表面筋電センサーです。皮膚に直接取り付けるため、装着が簡単で痛みや侵襲性が少ないことが特徴です。
- 利点: 安全・非侵襲、装着が容易
- 欠点: 筋肉の深部は測定しにくい、皮膚や汗などの状態に依存、電極がずれると精度低下
4.2. ワイヤレス筋電センサー
近年では、筋電センサーにBLE(Bluetooth Low Energy)やWi-Fiなどの通信モジュールを搭載し、ワイヤレスで筋電信号を送信するタイプも増えています。ケーブルが煩わしくないため、動きの大きな装着者やリハビリ運動のモニタリングに便利です。
- 利点: ケーブルが不要で可動域が広い
- 欠点: 電池駆動、価格が高い場合が多い、無線通信の遅延・干渉の可能性
4.3. 自作筋電アンプ(カスタム回路)
研究用途や特殊な要件(帯域幅の変更、増幅率の調整など)がある場合には、オペアンプや計装アンプで回路を自作することも可能です。ゲインやフィルタ特性を自由に設計できる一方で、ノイズ対策や安全性の担保に注意が必要です。
- 利点: 設計自由度が高い、低コストで作れる可能性
- 欠点: 回路設計の知識が必要、安全設計・絶縁設計が難しい
【参考:センサー比較表】
| 種類 | 特徴 | 価格帯 | 備考 |
|---|---|---|---|
| 表面筋電センサーモジュール | 手軽に測定、配線が簡単 | 2,000~10,000円 | Arduino用の既製品が豊富 |
| ワイヤレス筋電モジュール | ケーブルレス、取り回しが良い | 10,000円~ | BLEやWi-Fi対応 |
| 自作筋電アンプ | カスタマイズ性が高い、低コスト可能 | 数百円~ | 計装アンプIC + オペアンプなどで要自作 |
5. Arduinoなど電子工作との連携
5.1. Arduinoで筋電センサーを扱う基本構成
Arduino Unoなどのマイコン基板を使う場合、筋電センサーのアナログ出力をArduinoのアナログ入力(A0~A5など)に接続します。多くの筋電センサーモジュールでは5Vまたは3.3Vの電源を供給し、出力は0~Vs(電源電圧付近)程度の範囲で変化します。
- センサーからのアナログ信号が筋肉の収縮によって変動する
- Arduinoのアナログ入力で0~1023の範囲(10bit ADCの場合)として取得
- ソフトウェアで閾値処理やフィルタリング、動作判定などを実行
5.2. 配線例
ここでは、例としてSparkFun社のMyoWare筋電センサーをArduino Unoに接続する場合の配線を示します。
- MyoWare
- VCC → Arduinoの5V
- GND → ArduinoのGND
- SIG → Arduinoのアナログ入力A0 - Arduino Uno
- 5V → MyoWareのVCC
- GND → MyoWareのGND
- A0 → MyoWareのSIG
電極はMyoWareに直接装着できる簡易電極パッドを使用するか、有線のゲル電極を使用します。
5.3. コード例
以下は、筋電センサー(MyoWare等)からの信号をArduino UnoのA0ピンで読み取り、シリアルモニタに出力しつつ、一定のしきい値を超えたらLEDを点灯させる例です。
/*
シンプルな筋電センサー読み取り例
A0からの筋電値を読み取り、閾値以上でLEDを点灯
*/
// アナログ入力ピン
const int emgPin = A0;
// LEDピン
const int ledPin = 13;
// 閾値の設定(センサにより適宜変更)
int threshold = 300;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, LOW);
}
void loop() {
// 筋電値(0~1023)
int emgValue = analogRead(emgPin);
// シリアルモニタに出力
Serial.print("EMG Value: ");
Serial.println(emgValue);
// 閾値判定
if(emgValue > threshold){
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
delay(10);
}
thresholdの値はセンサーや電極の装着条件によって異なるため、実際の値を観察しながら調整してください。
delay(10)などのウェイトで多少安定させていますが、より正確な値を得るにはソフトウェアで平滑化したり、より高度なデジタルフィルタを用いる方法もあります。
6. リハビリ機器・応用例
6.1. リハビリ機器の試作
筋電センサーを用いたリハビリ機器としては、主に筋活動のフィードバックを視覚化するアプリケーションが多いです。例えば、以下のようなアイデアがあります。
- 筋活動フィードバック装置: 画面やLEDバーで筋活動量をリアルタイム表示し、患者が適切な力で運動できるよう誘導。
- ロボットアシストデバイス: 筋電信号をトリガーにして、モーターやアクチュエータが動き、関節の動きをサポートする。
リハビリ器具の制作では、安全性と装着性(エルゴノミクス)を考慮する必要があります。筋電センサーを取り付ける部位や固定方法を工夫し、運動時にセンサーが外れないようにしましょう。
6.2. 義手・外骨格(パワードスーツ)への応用
近年の研究では、義手や装着型外骨格(パワードスーツ)に筋電信号を用いる例が増えています。たとえば、上腕部や前腕部の筋活動をトリガーとして義手の開閉を制御する、あるいは下肢の大腿部や脛部にセンサーを貼り付けて、歩行や立ち上がりをサポートするロボティクス機器を制御するケースなどです。
6.3. ヘルスケア・トレーニングシステムへの応用
一般ユーザー向けには、筋活動を可視化してフォームチェックに役立てたり、トレーニングの質を向上させたりするシステムが考えられます。腕の筋電値を基にスマホアプリでバイオフィードバックを行うことで、正しい筋肉の使い方を学習できる利点があります。
7. メリット・デメリット
| 項目 | メリット | デメリット |
|---|---|---|
| 計測 | 自分の筋活動を数値化でき、バイオフィードバックに有用 | ノイズの影響を受けやすい |
| 装着 | 表面電極で非侵襲的に装着できる | 電極がずれると誤差が大きくなる、皮膚表面の状態(汗/皮脂)に影響される |
| 制御 | 筋電信号が直接モータやアクチュエータ制御に応用可能 | 信号解析が複雑、安定したパターン認識には機械学習の導入など高度化が必要 |
| コスト | Arduinoや市販モジュールを用いれば比較的低コストで導入可能 | 高精度・ワイヤレス化・多チャンネル化するとコストが上がる |
| 臨床応用 | リハビリ機器や義手制御に向いており、他のバイタルデータと組み合わせるとより発展性がある | 医療機器認証や安全基準を満たすためにはハードルが高い |
8. 注意点
8.1. 生体信号の取り扱い
筋電信号は人体から直接取得するデータです。安全性を確保するためには、絶縁回路や保護回路、絶縁電源の導入など、電気的リスクを最小化する工夫が必要です。特に自作回路やACアダプタの使用時などは、漏電や感電を防ぐために注意を払わなければなりません。
8.2. ノイズ対策
筋電信号は非常に微弱なため、周囲の電源線(50/60Hz)や電磁ノイズの影響を受けやすいです。以下のような対策が有効です。
- 電極ケーブルを短くする
- シールドケーブルを使う
- 被測定者や回路をアース参照する(ただし安全面に配慮)
- ソフトウェアフィルタ(移動平均、バンドパスフィルタなど)
8.3. センサーの安全性・電気的リスク
医療現場で利用する際は、医療用絶縁規格(IEC60601など)を満たす必要が出てきます。市販の実験用筋電モジュールは、必ずしも医療認証を取得しているわけではありません。リハビリ機器として患者に使用する場合は、機器認証や医療機器製造販売認証が必要になり得ることを理解しておきましょう。
9. 臨床応用に向けて
9.1. 臨床応用のプロセス
リハビリ機器として実際に臨床現場に導入するには、以下のステップを踏むことが望ましいです。
- 基礎実験・安全性評価: まずは少人数(研究施設内など)で実験し、安全性と基本的な有効性を確認。
- プロトタイプ改善: 機器の装着性、使い勝手、ノイズレベルなどを改善。
- 臨床試験(治験)またはパイロット試験: 規模を広げて被験者に使ってもらい、データ収集と評価。
- 認証取得: 医療機器として使用する場合は、薬機法(旧薬事法)に基づき届出・認証を行う。
- 量産・導入: 安全基準・認証をクリアした機器を本格的に生産し、臨床現場へ提供。
9.2. 倫理面・法規制
リハビリ分野での筋電センサー活用は患者の身体機能向上に寄与しますが、研究倫理やプライバシー保護に配慮が必要です。筋電データは個人情報の一部とみなされる場合もあり、取り扱いに注意が必要です。また、医療機器として使う場合は、法的な規制を遵守することが不可欠です。
10. まとめ
筋電センサーを用いた電子工作は、Arduinoなどを介して比較的低コストかつ簡単に始められます。自分の筋電位を可視化してトレーニングやリハビリに役立てることはもちろん、外部のアクチュエータを制御して義手・ロボットアシストなど多彩な応用が可能です。
- 基礎理解: 筋電センサーの原理や回路構成を知り、ノイズ対策や安全面に留意する。
- Arduino連携: センサーのアナログ出力を取り込み、プログラムで信号処理を行ってフィードバック装置や制御系を構築。
- 応用例: リハビリ器具、義手・外骨格、筋活動トレーニング装置など、幅広い分野での活用。
- メリット・デメリット: 非侵襲計測の手軽さと、ノイズに弱く感度が個人差に左右されやすい点を理解。
- 臨床応用: 実際の医療現場で使うには、法規制・倫理面・安全基準をクリアする必要がある。
本記事の内容を参照しながら、まずは簡単なフィードバック装置を作成してみたり、筋電信号の特性を観察することから始めてみてください。さらなる高精度化や多チャンネル化、無線通信機能の追加、機械学習によるパターン認識などを行えば、より高度な制御や動作認識にも応用できるでしょう。リハビリテーションの現場では、安全性の確保と適切な評価プロセスを踏まえつつ、筋電センサーを活用した新しいリハビリ支援機器の開発が進むことが期待されます。